光镊可控旋转是近年来光镊技术发展的新趋势之一,它有望突破传统光镊通常只具备三维空间直线运动的限制,不仅拓展了光镊微操控的自由度,还将为手性或螺旋型生物结构的研究注入新活力。实验室于2020年提出了基于二元复合微球(Janus球)的光镊可控旋转技术,发展了最低能量法仿真方法,获得了该球在光阱空间的三维稳态位姿。然而,最低能量法在微球瞬态受力分析方面存在局限。为分析非单一材质微球在光阱中的瞬态受力情况,实验室高晓晴博士发展了基于T矩阵的仿真方法,准确计算了微球在光阱中的瞬时受力,从而揭示了微球被光阱捕获过程中的姿态变化轨迹,并与实验结果完美一致。该方法不仅可以用于二元复合微球的光阱动力学研究,还可以推广到非规则形状多材质复合微结构的光阱受力计算。
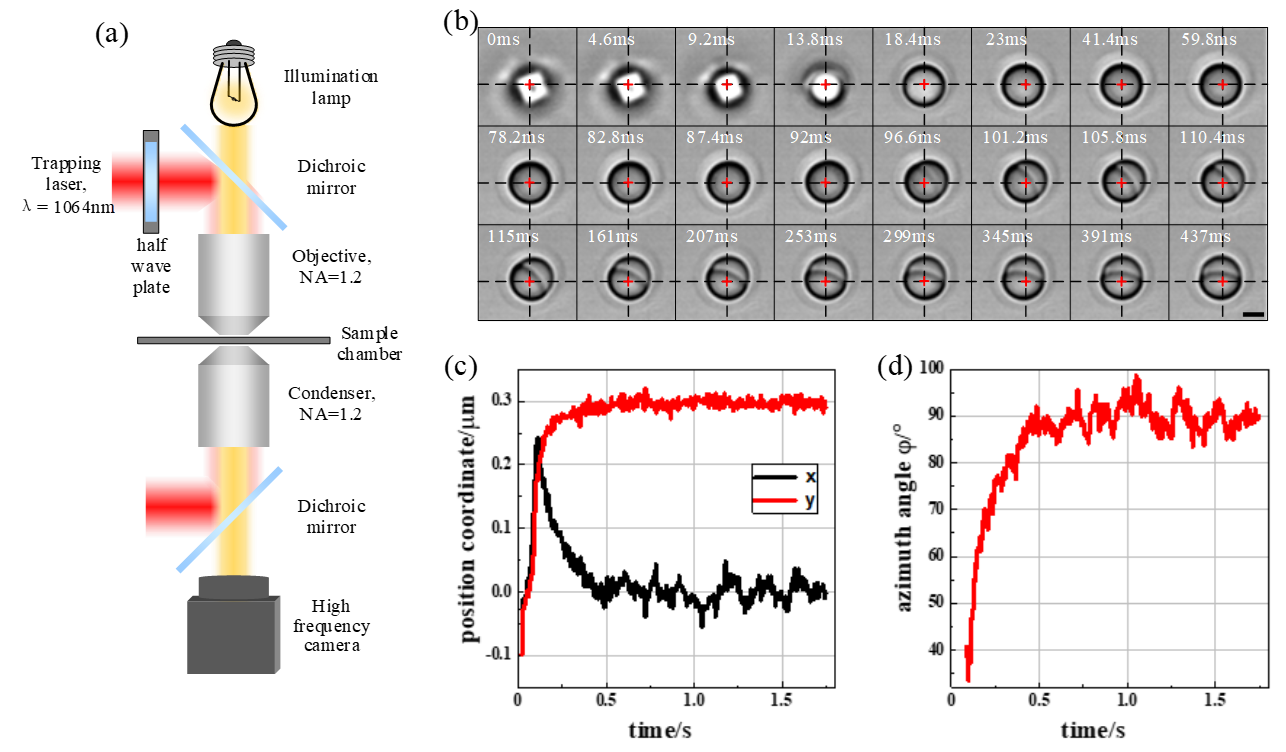
图1 二元复合微球在光阱捕获实验中的姿态变化轨迹
论文信息:
Simulation and Experiment of the Trapping Trajectory for Janus Particles in Linearly Polarized Optical Traps
X.Q. Gao, C. Zhai, Z.Z. Lin, Y.L. Chen, H.B. Li, C.G. Hu
Micromachines, 2022, 13, 608.